







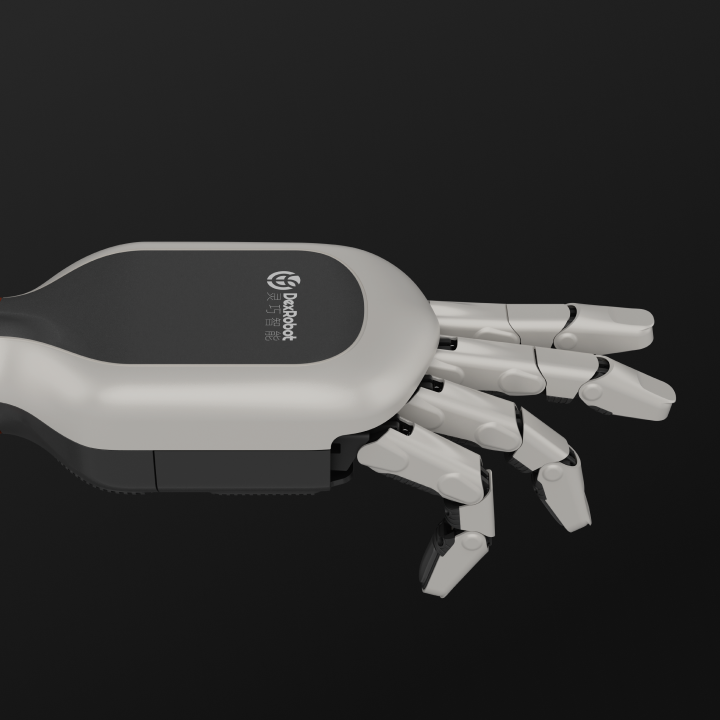
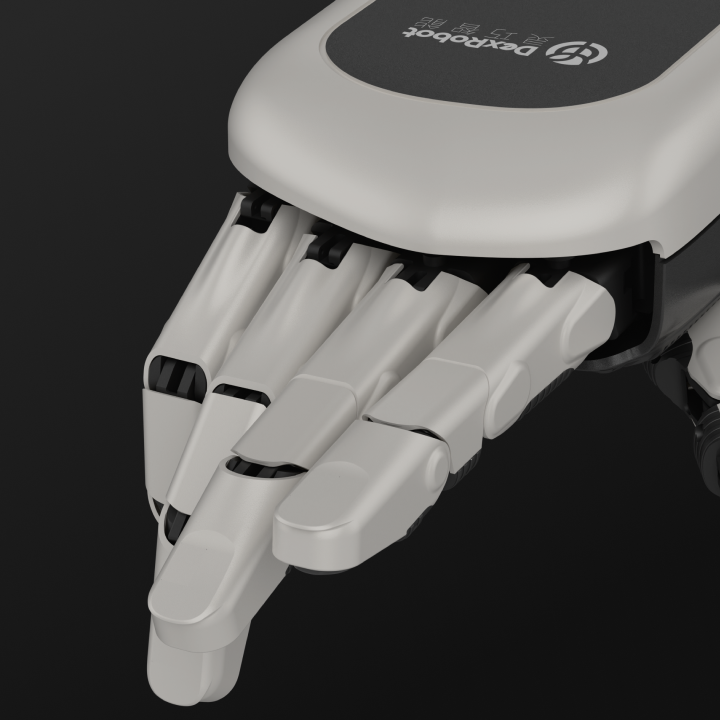
The First Commercial High-DOF,Multi-modal,Perceptive
Intelligent General-Purpose Dexterous Hand
Intelligent General-Purpose Dexterous Hand
High Reliability
>150,000
lifespan cycles
Low-power
Posture holding
without power drain
without power drain
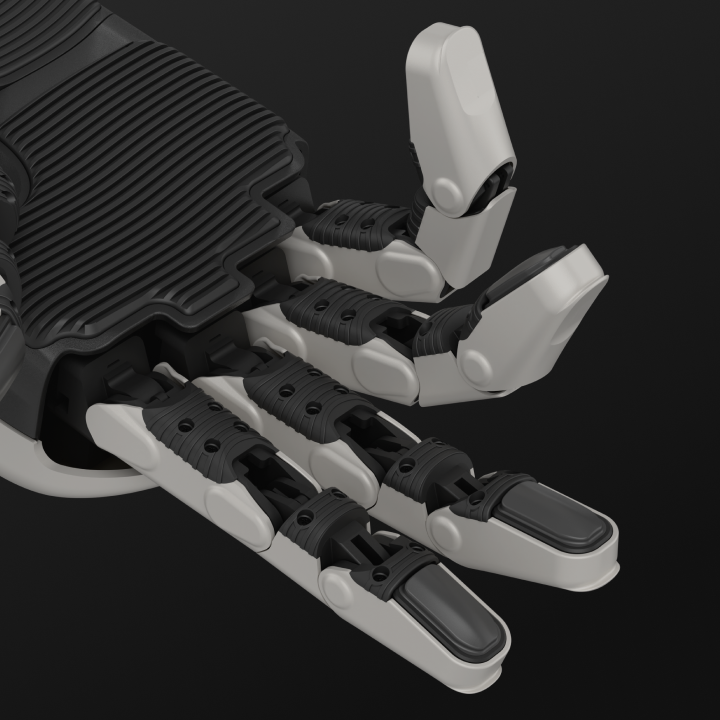
High-DOF
19 DOF
12 active and 7 passive
Strong Compatibility
Supports mainstream robot protocol and formats
High Integration
Integrates diverse communication protocol
Secondary Development
Fingertip Strength
Single finger
1,000g
load capacity
Easy Maintenance
5 fingers
Independently
Replaceable
Replaceable
Multi-modal
Four perceivable modalities
Position, Force, Slip
and Proximity
Position, Force, Slip
and Proximity
High Reliability
>150,000
lifespan cycles
Low-power
Posture holding
without power drain
without power drain
High-DOF
19 DOF
12 active and 7 passive
Strong Compatibility
Supports mainstream robot protocol and formats
High Integration
Integrates diverse communication protocol
Secondary Development
of DexHand tactile algorithms
Fingertip Strength
Single finger
1,000g
load capacity
Easy Maintenance
5 fingers
Independently
Replaceable
Replaceable
Multi-modal
Four perceivable modalities
Position, Force, Slip
and Proximity
Position, Force, Slip
and Proximity

Specifications
Joints
15
Weight
1.0kg
Drive Type
Motor
Transmission
Rope
Voltage
DC 24V
Static Current
0.1A
Maximum Current
7.4 A
Load Capacity
5kg
Communication
CAN, CANFD
Cycle Time
<1.0s
Cooling Capacity
2.38cfm
Lifespan
>150,000 cycles
Sensors
Position, Tactile, Force
Control Modes
Position, Trajectory, Force
OS
ROS1, ROS2, micro-ROS
Dexterous Operation
Hand rotation, multi-object grasping
supports 15+ human hand operations
such as cylindrical grasp, spherical grasp, and multi-finger pinching, etc.
supports 15+ human hand operations
such as cylindrical grasp, spherical grasp, and multi-finger pinching, etc.
Development Ecosystem
Multiple communication protocol open architecture for tactile algorithm development
Tactile Sensors
Normal Force: 20N
Proximity: ≥1cm
Proximity: ≥1cm
AI Capabilities
Simulation: model, physics engine, scenarios, real-time visualization
Toolkit: motion mapping, teleoperation, reinforcement & imitation learning(with preset scenarios)
Ecosystem: motion capture, VR integration(input/output), gesture recognition
Support: open protocol, custom scenes, algorithm extensions, ROS integration
Toolkit: motion mapping, teleoperation, reinforcement & imitation learning(with preset scenarios)
Ecosystem: motion capture, VR integration(input/output), gesture recognition
Support: open protocol, custom scenes, algorithm extensions, ROS integration
Simulation
model, physics engine, scenarios, real-time visualization
Toolkit
motion mapping, teleoperation
reinforcement & imitation learning(with preset scenarios)
Ecosystem
motion capture, VR integration(input/output)
gesture recognition
Support
open protocol, custom scenes, algorithm extensions
ROS integration
model, physics engine, scenarios, real-time visualization
Toolkit
motion mapping, teleoperation
reinforcement & imitation learning(with preset scenarios)
Ecosystem
motion capture, VR integration(input/output)
gesture recognition
Support
open protocol, custom scenes, algorithm extensions
ROS integration
Structure and Dimensions
Motion Parameters
Protocol Information










COPYROGHT © DEXROBOT INC. RIGHTS RESERVED. 浙ICP备2024093404号